
Rover Perseverance sada ima "svoj GPS" na Marsu, ne mora čekati instrukcije sa Zemlje

Za razliku od Zemlje, Mars nema mrežu navigacijskih satelita. Umjesto toga, robotske misije uključujući Perseverance, dugo su zavisile od senzora i kamera na brodu, snimaka sa svemirskih letjelica u orbiti i smjernica od timova misije udaljenih milionima kilometara kako bi se tačno utvrdilo gdje se nalaze.
"Zamislite da ste sami u ogromnoj pustinji, bez puteva i bez mapa i da dobijete samo jedan telefonski poziv dnevno da pitate: 'Gdje sam?'. To je ono što je NASA-in rover Perseverance morao raditi na Marsu pet godina. Za izuzetnu tačnost, trebali su mu ljudi nazad na Zemlji, ali više ne", rekla je Vandi Verma, svemirska robotičarka u JPL-u i članica inženjerskog tima Perseverance.
Od slijetanja u krater Jezero u februaru 2021. godine, rover Perseverance veličine automobila pratio je svoju poziciju analizirajući geološke karakteristike na fotografijama snimljenim svakih nekoliko metara i uzimajući u obzir proklizavanje točkova kako bi procijenio koliko je daleko prešao put.
Male greške se vremenom gomilaju, a na dužim vožnjama te netačnosti mogu ostaviti rover nesigurnim u svoj položaj za više od 35 metara. Ako izračuna da je možda preblizu opasnom terenu, rover se može rano zaustaviti i čekati pojašnjenje sa Zemlje.
"Ljudi mu moraju reći: 'Nisi izgubljen, siguran si, nastavi dalje'. Znali smo da bi, ako riješimo ovaj problem, rover mogao putovati mnogo dalje svaki dan", rekla je Verma.
Budući da je Mars u prosjeku udaljen oko 225 miliona kilometara od Zemlje, kašnjenja u komunikaciji onemogućavaju kontrolu u stvarnom vremenu, a takvo navođenje za smjer može trajati cijeli marsovski dan ili duže.
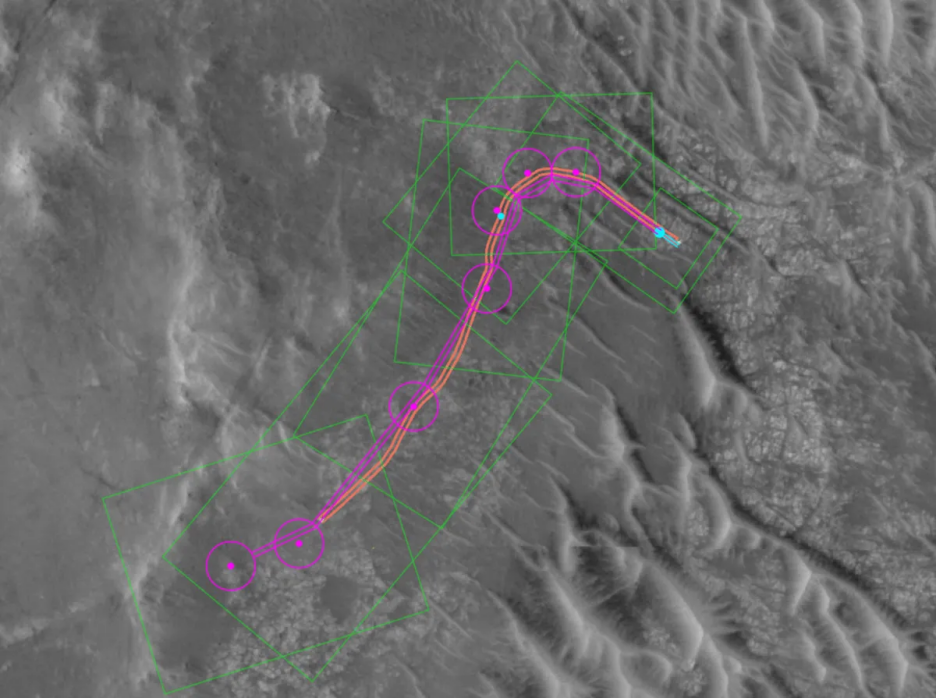
Međutim, s novom nadogradnjom nazvanom Mars Global Localization, Perseverance može uskladiti vlastite panoramske snimke s orbitalnim mapama terena, izračunati svoju preciznu poziciju i nastaviti planiranom rutom bez čekanja na potvrdu sa Zemlje.
Ugrađeni algoritam vrši poređenje za oko dvije minute i može precizno odrediti lokaciju rovera s tačnošću od otprilike 25 centimetara, sve bez pomoći ljudskih planera, saopćila je NASA. Ova sposobnost omogućava roveru da putuje znatno dalje, povećavajući količinu terena koju može istražiti i naučna istraživanja koja može provoditi, kažu naučnici.
Tim je počeo razvijati tehnologiju 2023. godine testirajući algoritam na snimcima iz 264 prethodna zaustavljanja rovera. U svakom slučaju, softver je ispravno identificirao lokaciju rovera. Sistem je uspješno korišten tokom rutinskih operacija početkom februara i ponovo ranije ove sedmice.
"Dali smo roveru novu sposobnost. Ovo je decenijama otvoren problem u istraživanju robotike i bilo je izuzetno uzbudljivo prvi put primijeniti ovo rješenje u svemiru", rekao je Jeremy Nash, inženjer robotike u JPL-u, koji je vodio projekt pod nadzorom Verme.
Ovaj napredak dolazi samo nekoliko sedmica nakon što je NASA objavila da je Perseverance završio svoju prvu vožnju na Marsu u potpunosti isplaniranu generativnom umjetnom inteligencijom.
U tom testu, softver umjetne inteligencije analizirao je iste fotografije i podatke o terenu koje koriste ljudski planeri, uključujući snimke s NASA-inog Mars Reconnaissance Orbitera, kako bi identificirao opasnosti poput stijena, strmih padina i kamenih polja, a zatim je mapirao sigurnu rutu s određenim koordinatama koje rover treba slijediti.
Prije slanja komandi na Mars, inženjeri su opsežno testirali plan koristeći detaljnog digitalnog blizanca rovera kako bi osigurali da može sigurno izvršiti vožnju, saopćila je NASA ranije.
U stvari, autonomne navigacijske mogućnosti Perseverancea postale su toliko efikasne u otkrivanju i upravljanju zaobilaženjem prepreka da je njegov domet vožnje manje ograničen izbjegavanjem opasnosti, a više neizvjesnošću o njegovoj preciznoj lokaciji.
Takva tehnologija bi mogla pomoći u uvođenju nove ere bržih, autonomnijih istraživanja ne samo na Marsu, već i na drugim svjetovima.
"Mogao bi je koristiti gotovo svaki drugi rover koji putuje brzo i daleko", zaključila je Verma.

Zmajevi nemaju mira u SAD-u: Naši navijači lutaju po hotelu i traže igrače

Naslovnica Guardiana posvećena BiH i OHR-u: Region bi mogao imati koristi ako SAD smanji svoj utjecaj

Policija će osiguravati reprezentativce BiH nakon današnjeg ulaska u hotel gdje su Zmajevi smješteni

Zmajevi večeras u "maloj Bosni" igraju posljednju pripremnu utakmicu pred Mundijal

Ukradeni podaci desetina hiljada turista koji dolaze na Jadran, na udaru bi mogli biti i bh. građani
